基于STM32移植FreeMODBUS RTU
温馨提示:
本文最后更新于 2025年12月11日,已超过 228 天没有更新。若文章内的图片失效(无法正常加载),请留言反馈或直接联系我。
一、FreeMODBUS
FreeModBus可通过官方网站下载:FreeMODBUS
包含以下文件
二、FreeMODBUS移植
只需要保留modbus以下内容就可以
还有demo中的port
主要修改port接口中的内容
串口的相关配置内容
/*
* FreeModbus Libary: BARE Port
* Copyright (C) 2006 Christian Walter <wolti@sil.at>
*
* This library is free software; you can redistribute it and/or
* modify it under the terms of the GNU Lesser General Public
* License as published by the Free Software Foundation; either
* version 2.1 of the License, or (at your option) any later version.
*
* This library is distributed in the hope that it will be useful,
* but WITHOUT ANY WARRANTY; without even the implied warranty of
* MERCHANTABILITY or FITNESS FOR A PARTICULAR PURPOSE. See the GNU
* Lesser General Public License for more details.
*
* You should have received a copy of the GNU Lesser General Public
* License along with this library; if not, write to the Free Software
* Foundation, Inc., 51 Franklin St, Fifth Floor, Boston, MA 02110-1301 USA
*
* File: $Id$
*/
#include "port.h"
/* ----------------------- Modbus includes ----------------------------------*/
#include "mb.h"
#include "mbport.h"
#include "usart.h"
/* ----------------------- static functions ---------------------------------*/
static void prvvUARTTxReadyISR( void );
static void prvvUARTRxISR( void );
/* ----------------------- Start implementation -----------------------------*/
void
vMBPortSerialEnable( BOOL xRxEnable, BOOL xTxEnable )
{ //控制中断的使能
/* If xRXEnable enable serial receive interrupts. If xTxENable enable
* transmitter empty interrupts.
*/
if( xRxEnable )
{
// printf("xRxEnable \n");
__HAL_UART_ENABLE_IT(&huart2, UART_IT_RXNE);
}
else
{
__HAL_UART_DISABLE_IT(&huart2, UART_IT_RXNE);
}
if( xTxEnable )
{
// printf("xTxEnable \n");
__HAL_UART_ENABLE_IT(&huart2, UART_IT_TXE);
}
else
{
__HAL_UART_DISABLE_IT(&huart2, UART_IT_TXE);
}
}
BOOL
xMBPortSerialInit( UCHAR ucPORT, ULONG ulBaudRate, UCHAR ucDataBits, eMBParity eParity )
{
// MX_USART2_UART_Init(); 在main.c中已经调用
return TRUE;
}
BOOL
xMBPortSerialPutByte( CHAR ucByte )
{
/* Put a byte in the UARTs transmit buffer. This function is called
* by the protocol stack if pxMBFrameCBTransmitterEmpty( ) has been
* called. */
USART2->DR=ucByte;
return TRUE;
}
BOOL
xMBPortSerialGetByte( CHAR * pucByte )
{
/* Return the byte in the UARTs receive buffer. This function is called
* by the protocol stack after pxMBFrameCBByteReceived( ) has been called.
*/
*pucByte=USART2->DR&0xFF;
return TRUE;
}
/* Create an interrupt handler for the transmit buffer empty interrupt
* (or an equivalent) for your target processor. This function should then
* call pxMBFrameCBTransmitterEmpty( ) which tells the protocol stack that
* a new character can be sent. The protocol stack will then call
* xMBPortSerialPutByte( ) to send the character.
*/
static void prvvUARTTxReadyISR( void )
{
pxMBFrameCBTransmitterEmpty( );
}
/* Create an interrupt handler for the receive interrupt for your target
* processor. This function should then call pxMBFrameCBByteReceived( ). The
* protocol stack will then call xMBPortSerialGetByte( ) to retrieve the
* character.
*/
static void prvvUARTRxISR( void )
{
pxMBFrameCBByteReceived( );
}
void USART2_IRQHandler(void)
{
// 获得接收中断标志位的时候 调用prvvUARTRxISR
if(__HAL_UART_GET_FLAG(&huart2, UART_FLAG_RXNE))
{
__HAL_UART_CLEAR_FLAG(&huart2, UART_FLAG_RXNE);
//printf("rxne \n");
prvvUARTRxISR();
}
// 获得发送中断标志位的时候 调用prvvUARTTxReadyISR
if(__HAL_UART_GET_FLAG(&huart2, UART_FLAG_TXE))
{
__HAL_UART_CLEAR_FLAG(&huart2, UART_FLAG_TXE);
prvvUARTTxReadyISR();
}
}
定时器的相关配置
/*
* FreeModbus Libary: BARE Port
* Copyright (C) 2006 Christian Walter <wolti@sil.at>
*
* This library is free software; you can redistribute it and/or
* modify it under the terms of the GNU Lesser General Public
* License as published by the Free Software Foundation; either
* version 2.1 of the License, or (at your option) any later version.
*
* This library is distributed in the hope that it will be useful,
* but WITHOUT ANY WARRANTY; without even the implied warranty of
* MERCHANTABILITY or FITNESS FOR A PARTICULAR PURPOSE. See the GNU
* Lesser General Public License for more details.
*
* You should have received a copy of the GNU Lesser General Public
* License along with this library; if not, write to the Free Software
* Foundation, Inc., 51 Franklin St, Fifth Floor, Boston, MA 02110-1301 USA
*
* File: $Id$
*/
/* ----------------------- Platform includes --------------------------------*/
#include "port.h"
/* ----------------------- Modbus includes ----------------------------------*/
#include "mb.h"
#include "mbport.h"
#include "tim.h"
/* ----------------------- static functions ---------------------------------*/
static void prvvTIMERExpiredISR( void );
/* ----------------------- Start implementation -----------------------------*/
BOOL
xMBPortTimersInit( USHORT usTim1Timerout50us )
{
// MX_TIM3_Init(); main.c已经调用
return TRUE;
}
inline void
vMBPortTimersEnable( )
{
/* Enable the timer with the timeout passed to xMBPortTimersInit( ) */
__HAL_TIM_SET_COUNTER(&htim3, 0);
HAL_TIM_Base_Start_IT(&htim3);
}
inline void
vMBPortTimersDisable( )
{
/* Disable any pending timers. */
HAL_TIM_Base_Stop_IT(&htim3);
}
/* Create an ISR which is called whenever the timer has expired. This function
* must then call pxMBPortCBTimerExpired( ) to notify the protocol stack that
* the timer has expired.
*/
static void prvvTIMERExpiredISR( void )
{
( void )pxMBPortCBTimerExpired( );
}
/**
* @brief This function handles TIM3 global interrupt.
*/
void TIM3_IRQHandler(void)
{
if(__HAL_TIM_GET_FLAG(&htim3, TIM_FLAG_UPDATE))
{
__HAL_TIM_CLEAR_FLAG(&htim3, TIM_FLAG_UPDATE);
prvvTIMERExpiredISR();
}
}
port.c中是关于线圈,离散寄存器,保持寄存器,输入寄存器相关操作方法的实现内容,且声明了相关寄存器的缓存区。
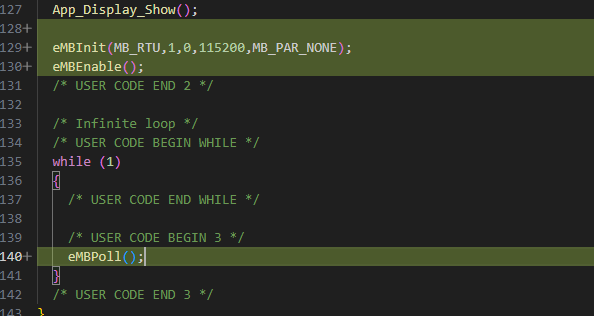
关闭ASCII

初始化
三、记录一下
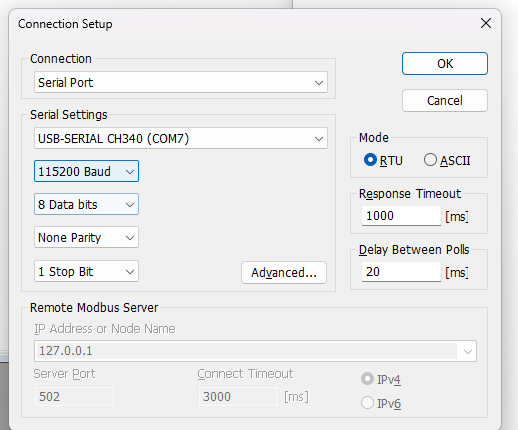
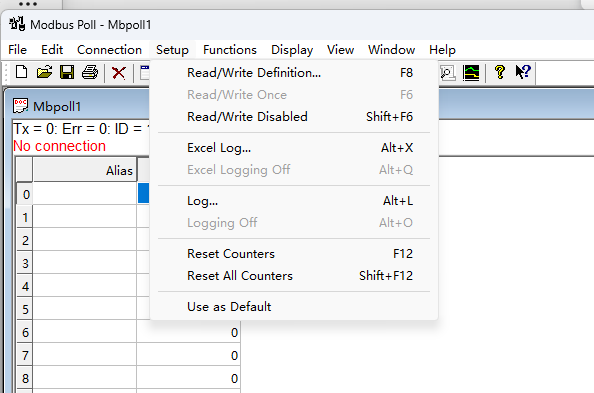
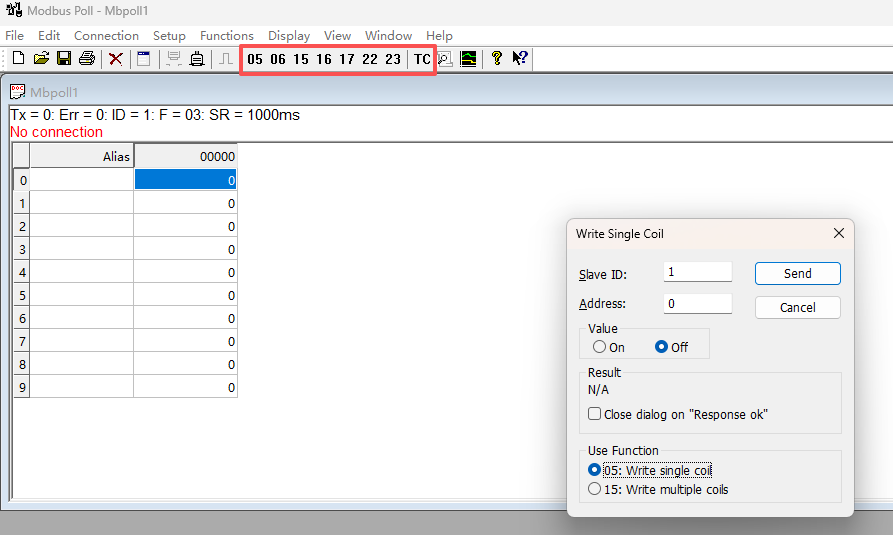
使用Modbus Poll通过modbus读取设备上的信息,Modbus Poll会设置slaveId所以在它日志文件中没有地址ID,设备接收到的数据是没问题的
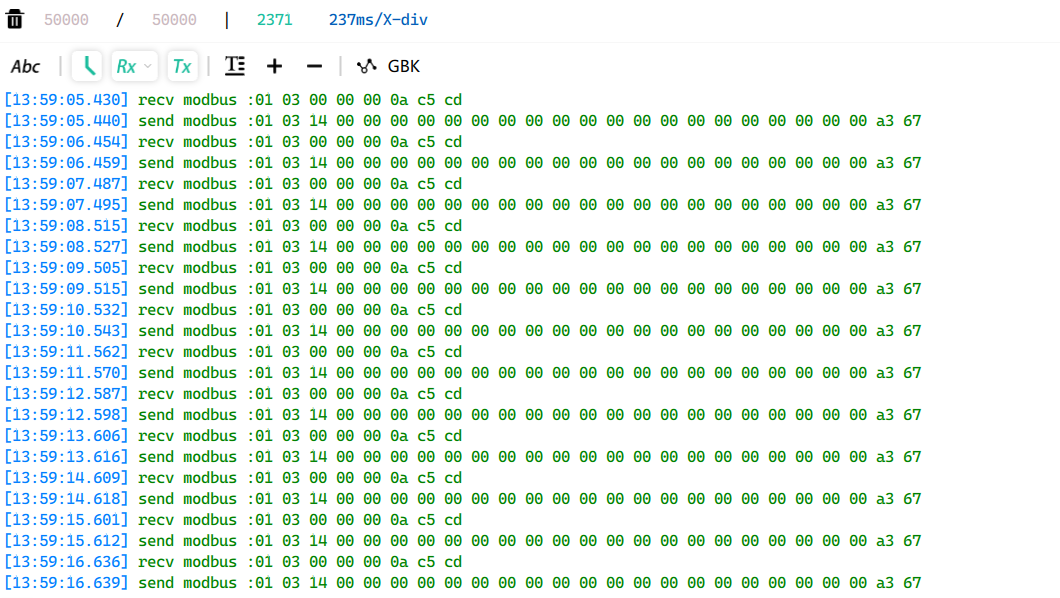
关于收发命令的含义
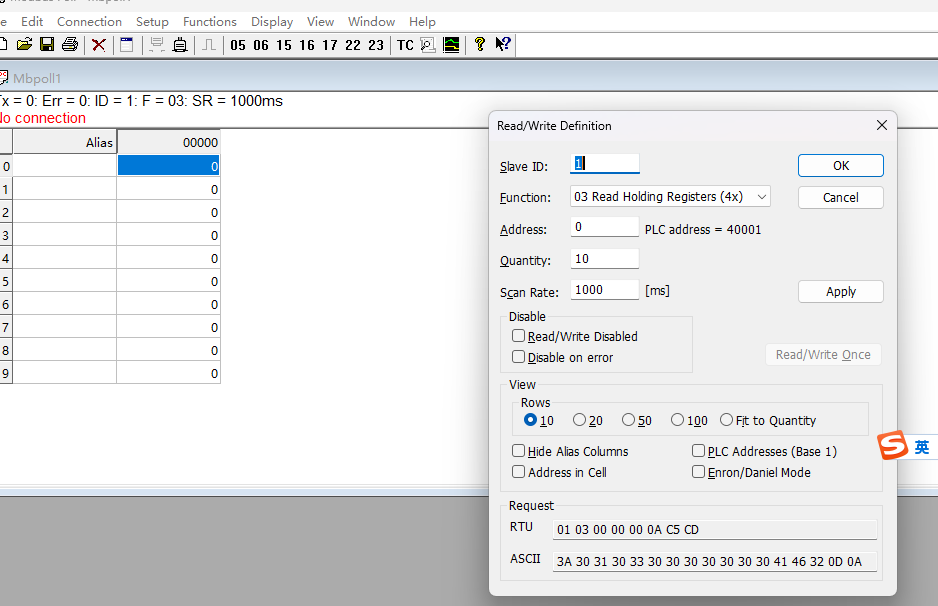
接收命令 (Rx): 01 03 00 00 00 0A C5 CD
Modbus RTU 请求帧,用于读取保持寄存器:
- 从站 ID:
01- 目标设备地址为 1 - 功能码:
03- 表示读取保持寄存器(Read Holding Registers) - 起始地址:
00 00- 从地址 0 开始读取(对应 Modbus 地址 40001) - 寄存器数量:
00 0A- 读取 10 个寄存器(0x0A = 10) - CRC校验:
C5 CD- 循环冗余校验码
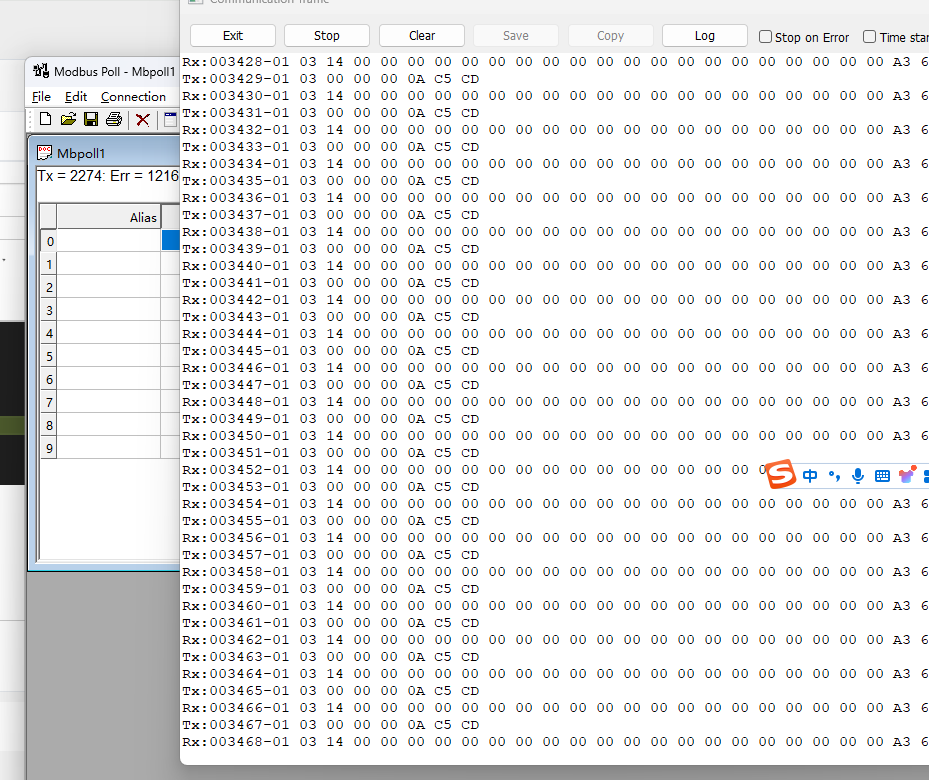
发送命令 (Tx): 01 03 14 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 A3 67
Modbus RTU 响应帧,服务器对请求的回复:
- 从站 ID:
01- 响应来自设备地址 1 - 功能码:
03- 与请求的功能码相同,表示正常响应 - 数据长度:
14- 后面有 20 字节的数据(10 个寄存器 × 2 字节/寄存器) - 寄存器数据:
00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00- 10 个寄存器的值都是 0 - CRC校验:
A3 67- 响应帧的校验码
数据解析
根据项目配置,这些寄存器对应以下变量:
- 地址 40001:
REG_HOLD_BUF[0] - 地址 40002:
REG_HOLD_BUF[1] - ...
- 地址 40010:
REG_HOLD_BUF[9]
发送的请求是读取地址 40001 开始的 10 个保持寄存器。服务器返回了这 10 个寄存器的值,全部为 0。
通信流程
- 主机发送请求:
01 03 00 00 00 0A C5 CD - 从机接收并处理请求
- 从机返回响应:
01 03 14 00 00 ... A3 67
如果需要修改这些寄存器的值,可以使用功能码 6(写单个寄存器)或 16(写多个寄存器)。
Modbus Poll也有其他的命令,可以自行尝试一下
正文到此结束
- 本文标签: 其他
- 本文链接: https://lijunze.me/article/8
- 版权声明: 本文由泽原创发布,转载请遵循《署名-非商业性使用-相同方式共享 4.0 国际 (CC BY-NC-SA 4.0)》许可协议授权